扫描硬件 SCANNING HARDWARE
三轴步进电机精准定位载玻片视野;显微摄像头与可切换光源协同采集多视野二维荧光图像;硬件状态实时反馈到桌面应用。
扫描硬件、桌面应用与本地 AI 推理服务在同一台 Windows 11 工控机内协同运行,无需外网、无需云端,所有数据与算法资产驻留在本地。
三轴步进电机精准定位载玻片视野;显微摄像头与可切换光源协同采集多视野二维荧光图像;硬件状态实时反馈到桌面应用。
统一的业务编排入口:登录权限、样本登记、扫描控制、图像处理、报告审核、统计查询、用户与系统设置——全员的日常操作均经此完成。
自研 YOLO 改进模型,以 Docker 容器形式运行,通过 WSL2 + NVIDIA Container Toolkit 直通宿主机 GPU;桌面应用经本地 HTTP 调用,单样本秒级返回结果。
从样本登记、自动扫描、智能识别,到报告审核与批量打印,所有操作员、审核员、管理员的高频动作都在桌面应用内一次完成。
按预设倍率、视野数、曝光与光源通道,自动驱动电机走遍目标区域,逐视野拍摄,单次任务典型 9 视野 (3×3) 1~2 分钟。
多视野原始图自动配准并拼接为完整视场大图,支持缩放、平移、亮度/对比度调节,原图与标注图可一键切换。
自研 YOLO 改进模型对荧光细胞进行目标检测/实例分割,输出位置、类别、置信度,并叠加到拼接大图上供操作员复核。
结构化报告自动生成;审核员可认可、修改或退回重扫,套用模板与术语库,每一次审核动作均留痕。
按时间、操作员、状态、样本编号多维查询;支持批量打印、导出 Excel/PDF;汇总日/月扫描量、阳性率等关键指标。
电机、摄像头、光源、AI 容器、数据库的健康状态在状态栏实时呈现;异常即时弹出可读提示,不阻塞主流程。
模型架构、损失函数、训练策略、后处理逻辑——核心算法全部由项目方自主设计与实现。不依赖任何第三方商业 AI 黑盒服务,所有产出物的知识产权归项目方所有。
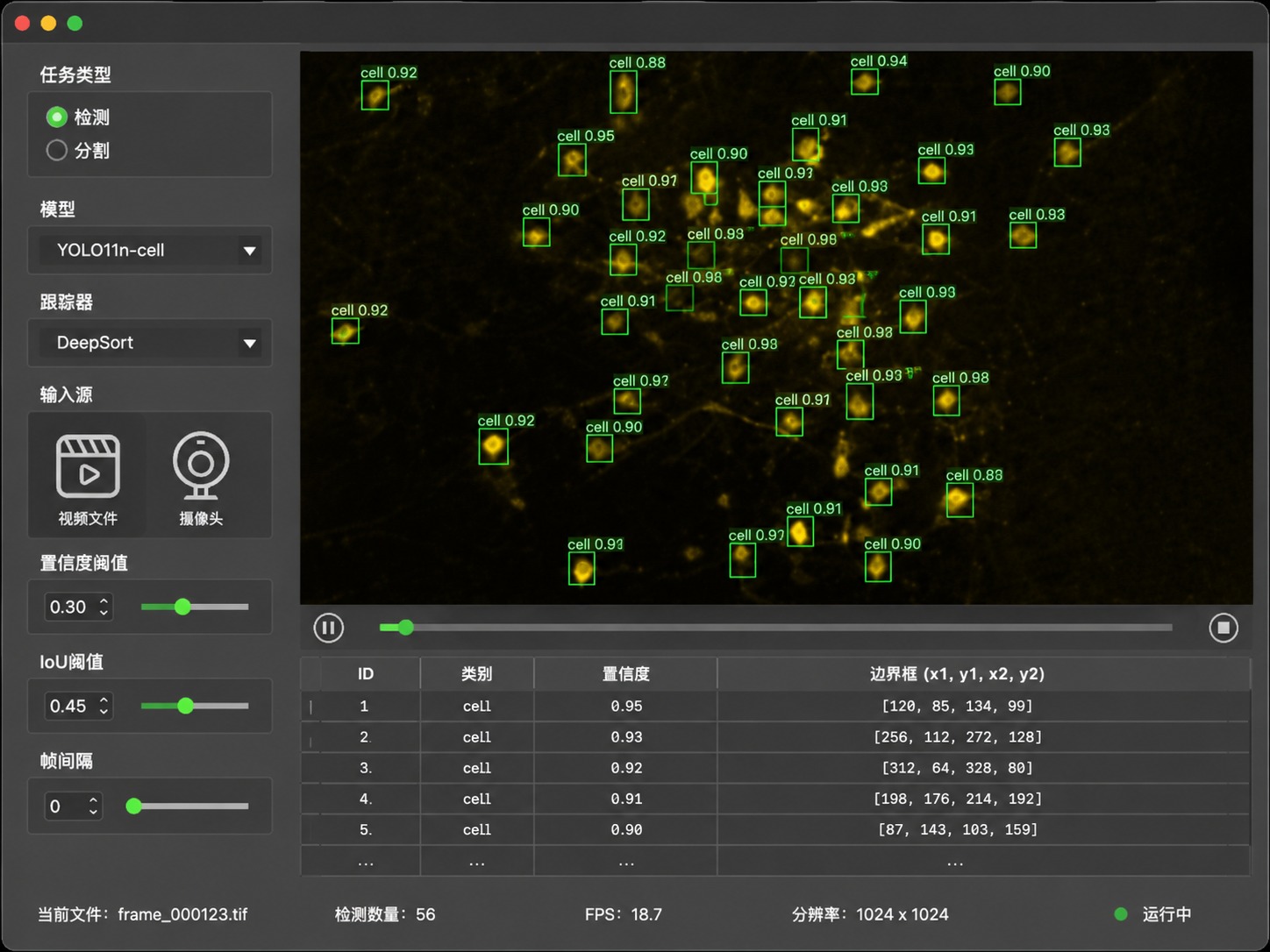
以下为 cell-detector 桌面应用的真实运行截图——YOLO11n-cell 配合 DeepSort 跟踪器,在 1024² 视场上以 18.7 FPS 实时检测,每一个荧光细胞都被框出并附置信度。
FIG · 5.1 实时荧光细胞检测——YOLO11n-cell 在 RTX-class GPU 上以 18.7 FPS 处理 1024×1024 帧;每个检测框附带类别与置信度,并同步写入结构化输出表,可直接作为审核与报告的依据。
主流程在单一界面内连续推进,不需要切换软件或介质。每个节点均落入数据库审计日志,状态机严格对齐《需求规格说明书》§5.6。
桌面客户端与 AI 推理容器同处一台工控机,通过本地 HTTP 通信;GPU 经 NVIDIA Windows 驱动经 WSL2 直通到容器,容器内无需安装 Linux 驱动。
≥ R470nvidia/cuda · pytorch/pytorchdocker save / load)本表列出系统在典型部署下的关键技术参数。最终交付参数以《验收方案》为准,可结合具体硬件配置调整。
我们可以为你的科室、临床实验室或科研团队安排一次现场演示——从入仓到签发,让 1~2 分钟内的完整流程跑给你看。